Ordinary RGB camera captures only 1 blurry frame (and consumes a lot of power).
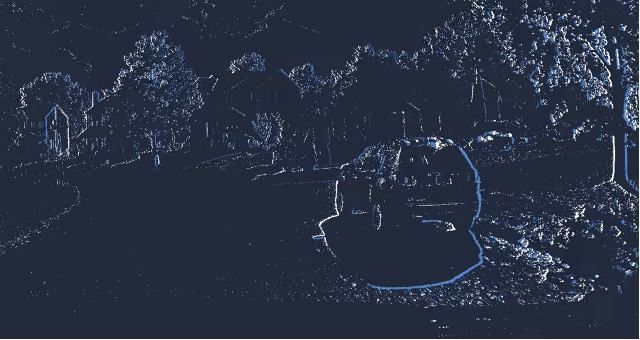
Neuromorphic cameras capture an almost continuous signal in a fraction of the power, avoid blur, and have HDR.
Opportunity: Design a system that can detect other moving vehicles using minimum bandwidth and latency and under challenging illumination conditions.
Challenge: How to establish a new theory for processing asynchronous events at 1MHz at the pixel level when all established computer vision works only with frames.
Sponsors: Sony Semiconductor Solutions, Prophesee, IARPA, National Science Foundation