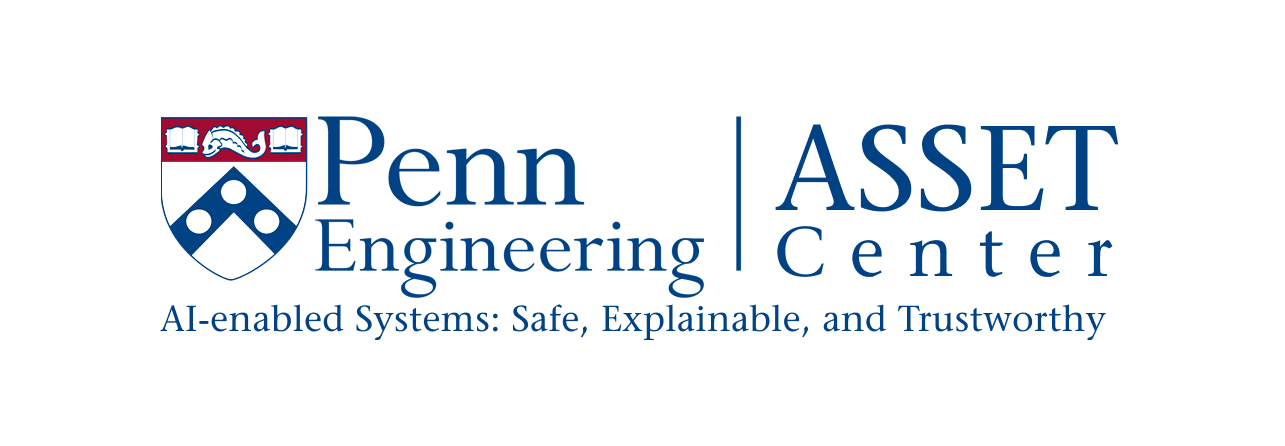
Data-Efficient Manipulation via Non-Smooth Implicit Learning
Faculty: Michael Posa
Opportunity: How can robots adapt to new tasks and novel environments? For intelligent systems to safely deploy into our homes and workplaces, they will need to achieve both high performance and reliability even when presented with the variability and complexity of the real world.
Challenge:Deep learning is classically data-hungry, but real data can be hard to come by in robotics. The need for data is exacerbated by fundamentally misalignment between the biases of popular neural networks and the physics of contact. New strategies are needed to develop physics-inspired methods for data-efficient robot learning.