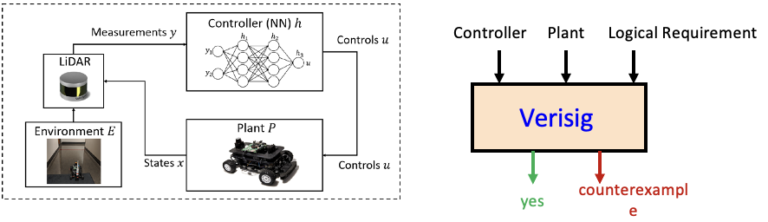
Opportunity: Design a controller mapping raw sensory data to control actions by training a neural network based on simulation data.
Challenge: How to verify absence of collisions for all possible initial conditions and errors in measurements giving worst-case safety guarantees?